协作机器人

机器人控制系统

ACR5 Moki

ARCC165标准控制系统

ARCC50标准控制系统

AIR6ARC

AIR165大负载机器人

AIR50中负载机器人

AIR20中负载机器人

AIR10轻负载机器人





2025-11-19
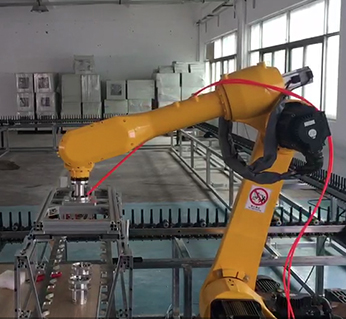
在传统的自动化仓储和物流环节中,码垛机器人通常依赖高重复性的“盲抓”模式工作——工件以固定姿态、精确位置出现在预定地点,机器人只需重复示教的轨迹即可。然而,随着制造业向小批量、多品种的柔性生产转型,以及物流中心面对海量SKU的挑战,这种固定模式的局限性日益凸显。为现有码垛机器人集成视觉系统,使其获得“眼
2025-11-19
在现代化智能仓储和生产线中,码垛机器人已成为不可或缺的核心装备。它取代了传统的人力搬运,在提升作业一致性、降低劳动强度和工伤风险方面优势明显。然而,投资机器人的最终目的是为了降本增效,而节拍——即机器人完成一个完整工作循环(如抓取、移动、放置)的时间——是衡量其生产效率最关键的指标。优化码垛机器人节
2025-09-20
如何系统化解决码垛机器人抓取不稳或掉箱问题?码垛机器人作为现代仓储物流和生产线上的核心装备,其稳定性和效率直接关系到整个系统的产出。然而,“抓取不稳”或“中途掉箱”是现场工程师和维护人员经常遇到的棘手问题。这不仅会导致生产中断、效率下降,还可能造成产品损坏、设备损伤甚至安全隐患。解决此类问题不能仅靠
2025-11-19
在传统的自动化仓储和物流环节中,码垛机器人通常依赖高重复性的“盲抓”模式工作——工件以固定姿态、精确位置出现在预定地点,机器人只需重复示教的轨迹即可。然而,随着制造业向小批量、多品种的柔性生产转型,以及物流中心面对海量SKU的挑战,这种固定模式的局限性日益凸显。为现有码垛机器人集成视觉系统,使其获得“眼